Категорія: Роборука
-

1 Вступ
План уроку Матеріали Результат уроку Результатом даного уроку має бути: Розуміння студентів, що проходять курс, з яких складових компонентів складається роборука, система керування та яке ПЗ будемо використовувати для проходження курсу. Структура курсу Додаткове ПЗ Visual Studio Code CP210x USB to UART Bridge VCP Drivers – Silicon Labs Встановлення драйвера CH340 для плат Arduino Uno,…
-

2.1 Система керування. Початок роботи з IMU
План уроку Матеріали Результат уроку Результатом даного уроку має бути: ESP32 із MPU6050, що вимірюють прискорення та кутову швидкість, і розраховують орієнтацію в просторі методом інтегрування Ейлера. Урок Підключення IMU до ESP32 Для підключення гіроакселерометра до плати розробника ми будемо використовувати I2C шину: Контакти на ESP32 Контакти на MPU6050 GPIO 22 (SCL) SCL GPIO 21…
-
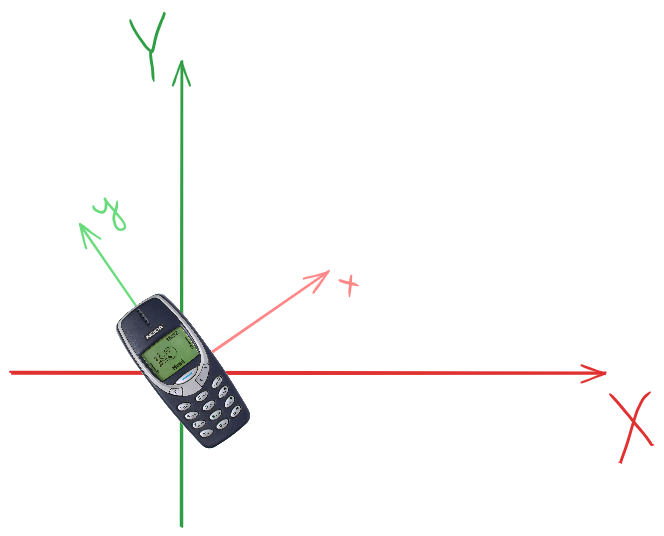
2.2 Система керування. Основа орієнтації в просторі.
План уроку Матеріали Результат уроку Результатом даного уроку має бути: ESP32 із MPU6050, що вимірюють прискорення та кутову швидкість, і розраховують орієнтацію в просторі методом інтегрування Ейлера. Урок Основи орієнтації в просторі. Кути Ейлера Орієнтація об’єкта в просторі – це його положення відносно глобальної системи координат. Нижче на зображенні представлено дві системи координат: глобальну (XY)…
-
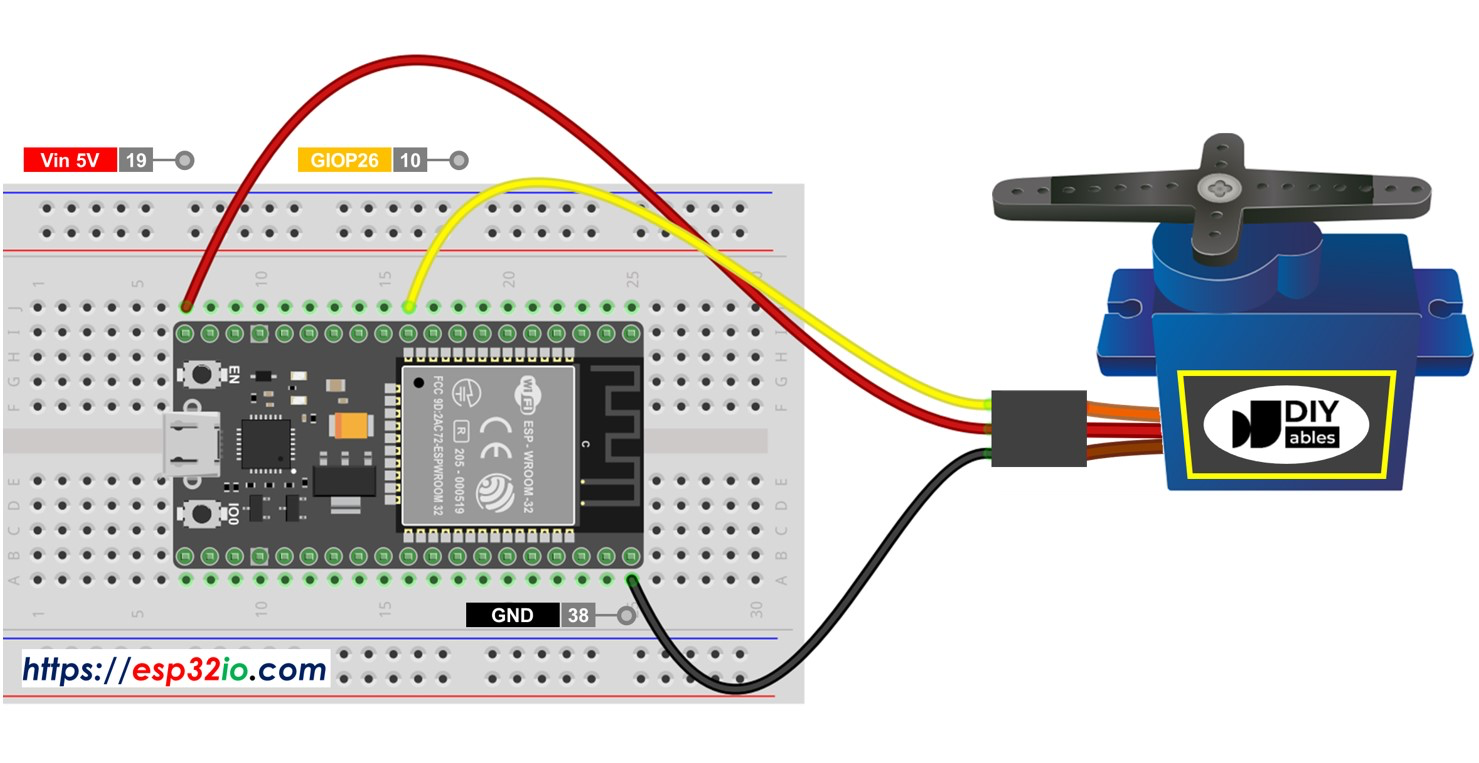
3 Використання розрахованих кутів для роботи з сервомоторами
План уроку Матеріали Результат уроку Результатом даного уроку має бути: ESP32 із MPU6050, що вимірюють прискорення та кутову швидкість, і розраховують орієнтацію в просторі методом інтегрування Ейлера та передають дані кути для обертання сервомоторів Урок Робота із сервомоторами 1. Підключення сервомотора MG90 до ESP32 Для підключення використовуємо наступні піни на ESP32: 2. Встановлення бібліотеки Існує…
-

4 Створення електроніки для Роборуки. Передавання даних між СК та електронікою Роборуки
План уроку Матеріали Результат уроку Результатом мають бути два модулі: Між двома модулями має бути організовано передачу даних. На електроніці СК розраховуємо кути орієнтації, передаємо на електроніку Роборуки, обробляємо та змінюємо кути положення валів сервомоторів. Урок ESP-NOW ESP-NOW — це протокол бездротового зв’язку для ефективного передавання між пристроями з низькою затримкою, здатний надсилати до 250…
-
5 Зміна підходу до розрахунку орієнтації в просторі (в процесі)
План уроку Матеріали Результат уроку Результатом даного уроку має бути: Дана стаття знаходиться на етапі редакції та не опублікована повністю Урок В чому проблема використання кутів Ейлера? – так звані замки Ейлера.Якщо простіше – ми можемо це зрозуміти переглянувши наступні анімації: на першій анімації видно, що плече нашої руки може обертатись як мінімум в трьох…