План уроку
- Робота з сервомоторами
- Біаси. Їх фільтрування для збільшення точності
Матеріали
- ESP32
- Сервомотор SG90
- Гіроакселерометр MPU6050
Результат уроку
Результатом даного уроку має бути:
ESP32 із MPU6050, що вимірюють прискорення та кутову швидкість, і розраховують орієнтацію в просторі методом інтегрування Ейлера та передають дані кути для обертання сервомоторів
Урок
Робота із сервомоторами
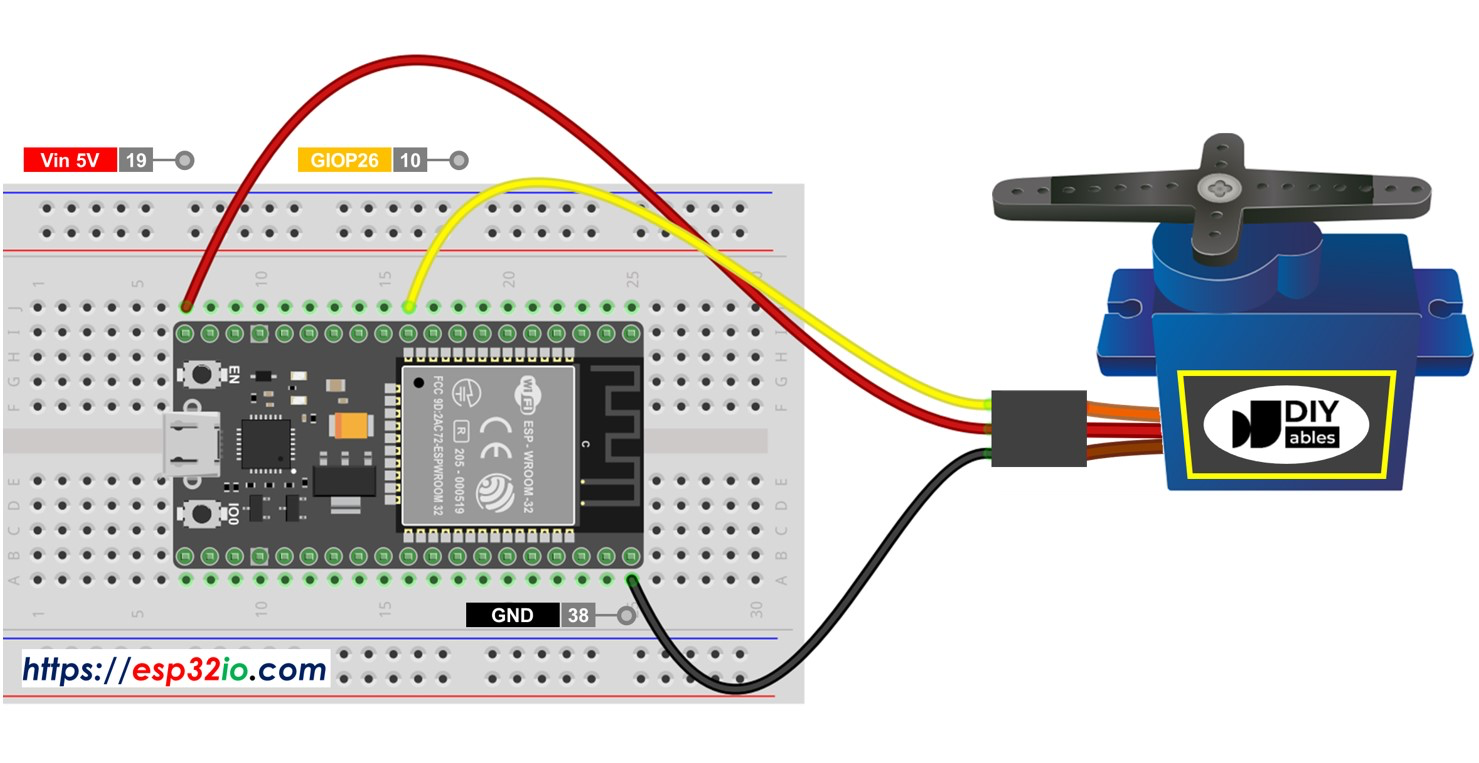
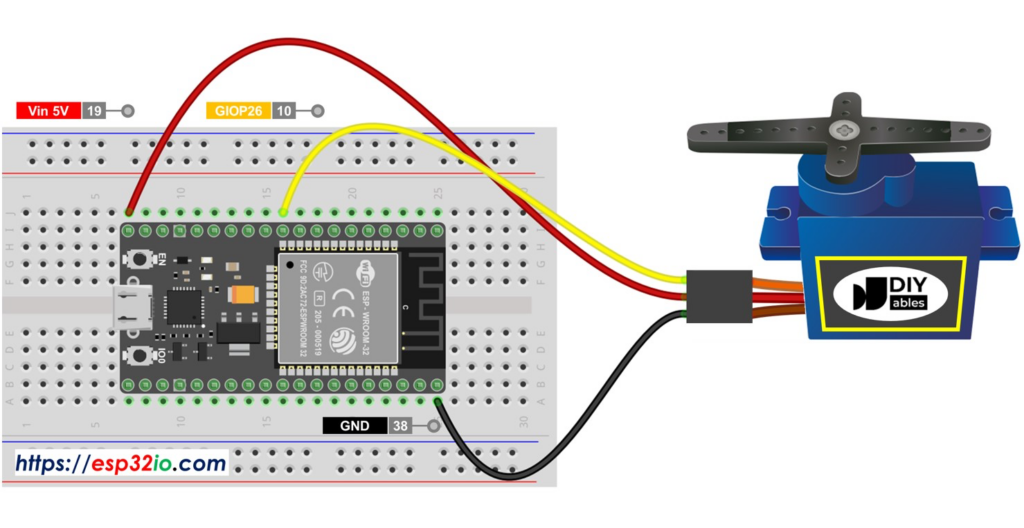
1. Підключення сервомотора MG90 до ESP32
Для підключення використовуємо наступні піни на ESP32:
VIN– Живлення +5В (червоний)GPIO26– сигнал керування (жовтий)GND– земля, мінус (чорний)
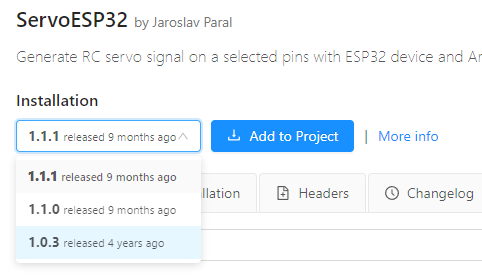
2. Встановлення бібліотеки
Існує декілька варіантів бібліотеки Servo для ESP32. Найпоширеніші з них – ESP32Servo та ServoESP32. Список функцій, класів та методів у них однаковий, використання теж однакове. Різниця тільки в підключенні.
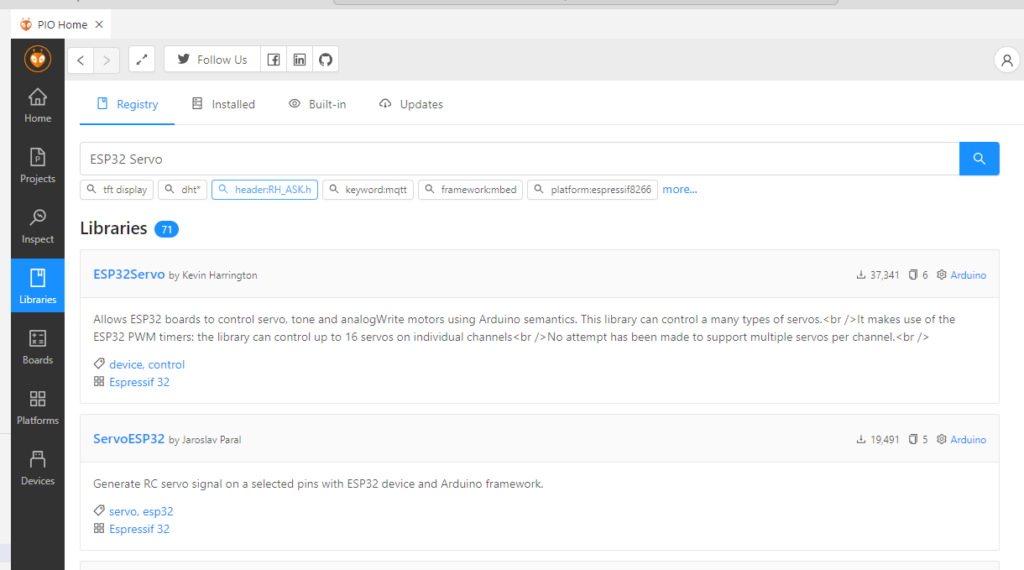
ВАЖЛИВО: При використанні бібліотеки ServoESP32 єдина робоча версія – 1.0.3!
Для ESP32Servo підключення відбувається за допомогою коду <ESP32Servo.h>
Для ServoESP32 просто <Servo.h>
3. Прошивка
В даному коді використовується бібліотека ESP32Servo.
Приклад коду для тестування:
#include <ESP32Servo.h>
// Пін, до якого підключено сервопривід
static const int servoPin = 26;
// Створення об'єкта сервоприводу
Servo servo1;
void setup() {
// Ініціалізація послідовного порту на швидкості 115200 біт/сек
Serial.begin(115200);
// Вказуємо для об'єкта servo1 на якому піні подається сигнал керування
servo1.attach(servoPin);
}
void loop() {
// В циклі спочатку прокручуємо вал сервомотору від 0 до 180 градусів
for(int posDegrees = 0; posDegrees <= 180; posDegrees++) {
servo1.write(posDegrees); // Виведення значення кута на сервомотор
Serial.println(posDegrees);
delay(1);
}
// А потім повертаємо зі 180 градусів до 0
for(int posDegrees = 180; posDegrees >= 0; posDegrees--) {
servo1.write(posDegrees); // Виведення значення кута на сервомотор
Serial.println(posDegrees);
delay(1);
}
}
Після прошивки, вал сервомотору повинен почергово повертатись на 180 градусів в обидва напрямки
Робота з гіроакселерометрами
За основу візьмемо код з другого уроку:
1. Для збільшення точності наших розрахунків потрібно вирахувати помилку стабільного зміщення даних, так званий bias(зміщення).
Для цього створимо змінні, куди запишемо похибку:
double deltaX, deltaY, deltaZ;
В функції setup додаємо блок коду, який розрахує похибки:
// Розрахуємо відхилення за допомогою знаходження середнього значення (500 ітерацій)
for (size_t i = 0; i < 500; i++)
{
// Читаємо дані з давача
mpu.getEvent(&a, &g, &temp);
deltaX = deltaX + g.gyro.x; //
deltaY = deltaY + g.gyro.y; // сумуємо для кожної з осей значення від давачів
deltaZ = deltaZ + g.gyro.z; //
}
deltaX = deltaX / 500; //
deltaY = deltaY / 500; // Ділимо кожне значення на кількість ітерацій
deltaZ = deltaZ / 500; // і знаходимо середнє
2. Розраховуємо кути із кутової швидкості
Додаємо змінні, куди будемо записувати розрахований кут:
double angleX, angleY, angleZ;
В функції loop замість попереднього коду додаємо наступний:
if((millis() - lastSendTime) >= 10) {
// Отримуємо дані від давача
mpu.getEvent(&a, &g, &temp);
// Розраховуємо кут інтегруючи кутову швидкість (також віднімаємо біаси)
angleX = angleX + (g.gyro.x - deltaX) * 0.01;
angleY = angleY + (g.gyro.y - deltaY) * 0.01;
angleZ = angleZ + (g.gyro.z - deltaZ) * 0.01;
// ^ ^ ^
// попередній компенсація множення кутової швидкості на час (10 мс)
// кут біасів для знаходження кута
Serial.print(angleX); //
Serial.print("\t\t"); //
Serial.print(angleY); // Виводимо значення в послідовний порт
Serial.print("\t\t"); //
Serial.print(angleZ); //
Serial.println(); //
lastSendTime = millis();
}
3. Крутимо сервомотори
Підключаємо бібліотеку та задаємо піни для серво:
#include <ESP32Servo.h> #define SERVO_X_PIN 13 #define SERVO_Y_PIN 15
Створюємо глобальні об’єкти типу Servo :
Servo servoX; Servo servoY;
В функції setup додаємо блок коду, який ініціалізує сервомотори:
servoX.attach(SERVO_X_PIN); servoY.attach(SERVO_Y_PIN);
В фукнції loop всередину if((millis() - lastSendTime) >= 10) додаємо блок коду, який оновлює кути на сервомоторах з розрахованих раніше X та Y:
servoX.write(angleX); servoY.write(180 - angleY);
Весь код:
#include <Arduino.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <ESP32Servo.h>
#define SERVO_X_PIN 13
#define SERVO_Y_PIN 15
Adafruit_MPU6050 mpu;
sensors_event_t a, g, temp;
uint32_t lastSendTime = 0;
double deltaX, deltaY, deltaZ;
double angleX, angleY, angleZ;
Servo servoX;
Servo servoY;
void setup()
{
// Init Serial Monitor
Serial.begin(115200);
if (!mpu.begin())
{
Serial.println("Failed to find MPU6050 chip");
while (1)
{
delay(10);
}
}
mpu.setAccelerometerRange(MPU6050_RANGE_16_G);
mpu.setGyroRange(MPU6050_RANGE_2000_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_260_HZ);
delay(100);
// Розрахуємо відхилення за допомогою знаходження середнього значення (500 ітерацій)
for (size_t i = 0; i < 500; i++)
{
// Читаємо дані з давача
mpu.getEvent(&a, &g, &temp);
deltaX = deltaX + g.gyro.x; //
deltaY = deltaY + g.gyro.y; // сумуємо для кожної з осей значення від давачів
deltaZ = deltaZ + g.gyro.z; //
}
deltaX = deltaX / 500; //
deltaY = deltaY / 500; // Ділимо кожне значення на кількість ітерацій
deltaZ = deltaZ / 500; // і знаходимо середнє
// Ініціалізуємо сервомотори
servoX.attach(SERVO_X_PIN);
servoY.attach(SERVO_Y_PIN);
}
void loop()
{
if((millis() - lastSendTime) >= 10) {
// Отримуємо дані від давача
mpu.getEvent(&a, &g, &temp);
// Розраховуємо кут інтегруючи кутову швидкість (також віднімаємо біаси)
angleX = angleX + (g.gyro.x - deltaX) * 0.01;
angleY = angleY + (g.gyro.y - deltaY) * 0.01;
angleZ = angleZ + (g.gyro.z - deltaZ) * 0.01;
// ^ ^ ^
// попередній компенсація множення кутової швидкості на час
// кут біасів (10 мс) для знаходження кута
// Оновлюємо кути сервомоторів
servoX.write(angleX);
servoY.write(180 - angleY);
lastSendTime = millis();
}
}