План уроку
- Основи орієнтації в просторі. Кути Ейлера
- Використання кутової швидкості для розрахунку орієнтації в просторі
Матеріали
- ESP32 – 10 шт
- IMU MPU6050 – 10 шт
- Провідники 4-х кольорів, 26AWG, по 10 м.
- Паяльники
- Припій. Флюс/каніфоль
Результат уроку
Результатом даного уроку має бути:
ESP32 із MPU6050, що вимірюють прискорення та кутову швидкість, і розраховують орієнтацію в просторі методом інтегрування Ейлера.
Урок
Основи орієнтації в просторі. Кути Ейлера
Орієнтація об’єкта в просторі – це його положення відносно глобальної системи координат.
Нижче на зображенні представлено дві системи координат: глобальну (XY) та локальну (xy). Локальна система координат (ЛСК) прив’язана до об’єкта (Nokia 3310:D), що знаходить в Глобальній системі координат (ГСК).
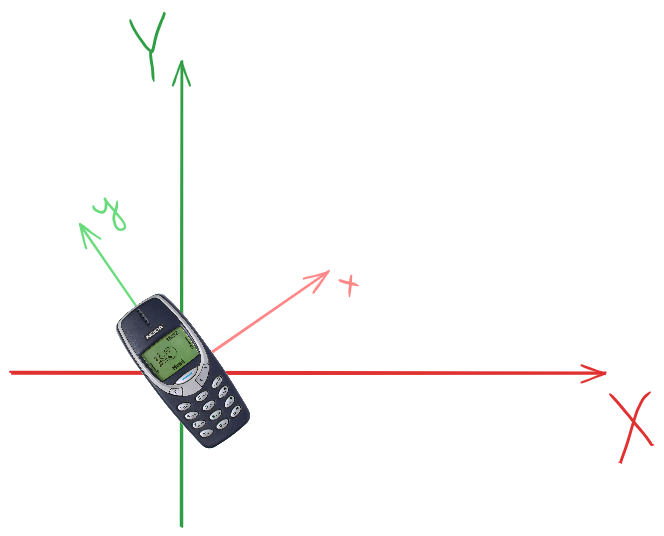
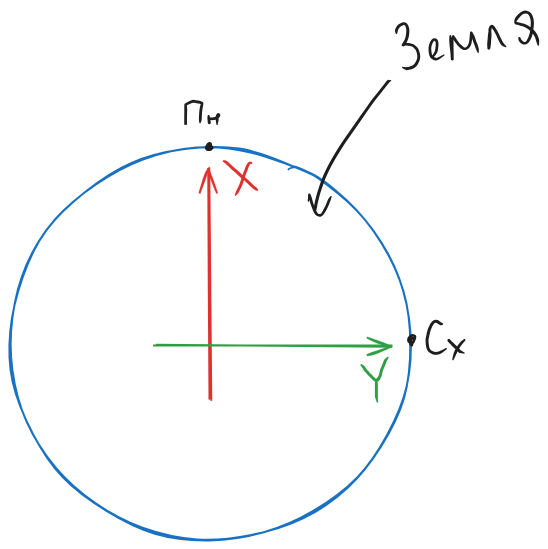
Глобальною системою координат може виступати наша планета, осі якої будуть розміщені відповідно сторонам світу, при цьому прошу звернути увагу, що вісь X завжди направлена на Північ, а Y – Схід.
Кути Ейлера (названі на честь швейцарського математика Леонарда Ейлера) – це спосіб описати орієнтацію об’єкта в тривимірному просторі за допомогою трьох кутів:
- Крен, або roll, позначається грецькою літерою φ
- Тангаж, або pitch, позначається грецькою літерою θ
- Рискання, або yaw, позначається грецькою літерою ψ
Як це працює?
- Крен (φ): Обертання навколо поздовжньої осі (X).
- Тангаж (θ): Обертання навколо поперечної осі (Y).
- Рискання (ψ): Обертання навколо вертикальної осі (Z).
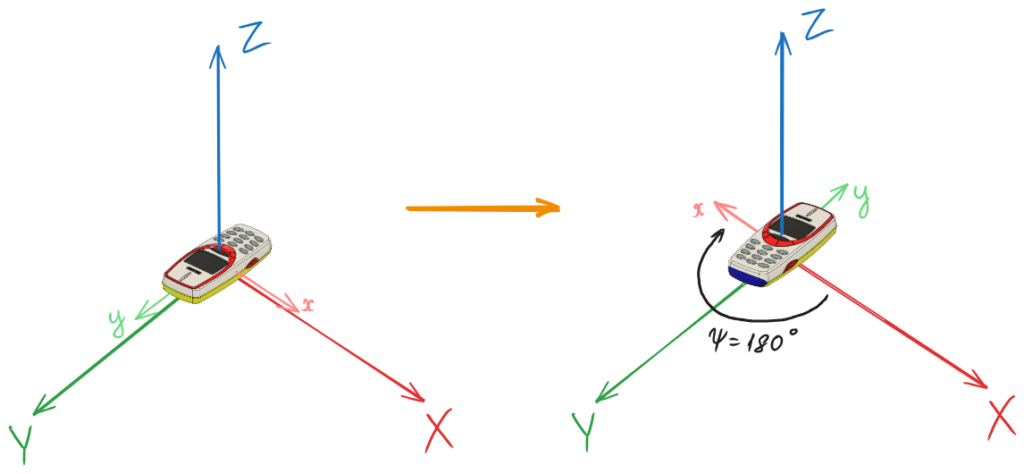
На зображенні вище представлено обертання об’єкта навколо осі Z (по рисканню) на 180°
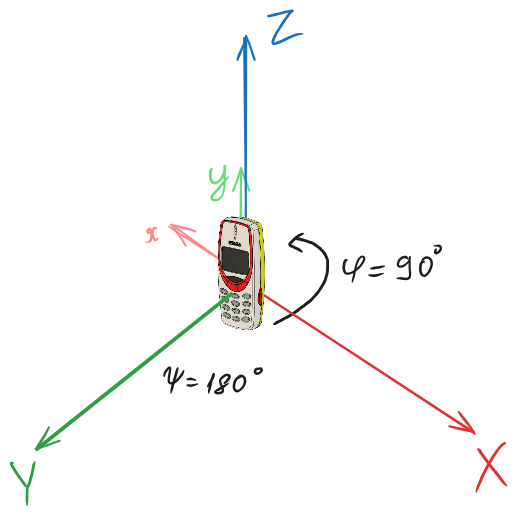
Так само можна обертати об’єкт і по інших осях, наприклад Х, зберігаючи попередні обертання:
Де застосовується?
Кути Ейлера широко використовуються в:
- Авіації та космонавтиці
- Робототехніці
- Комп’ютерній графіці та анімації
- Навігаційних системах
Наприклад, в авіації:
- Крен – нахил літака вліво або вправо
- Тангаж – підйом або опускання носа літака
- Рискання – поворот літака вліво або вправо
Для кращого розуміння логіки обертання об’єкта в просторі було створено програму RotationVisualiser, що дозволяє візуалізувати в реальному часі зміну орієнтації об’єкта в просторі:
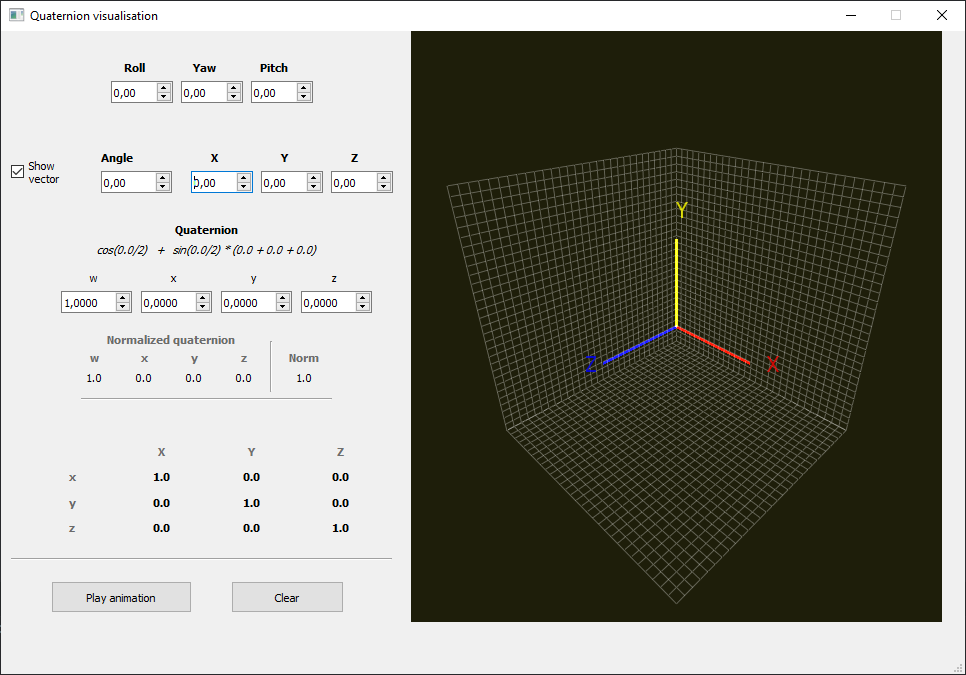
Змінюючи наступні параметри ми зможемо змінювати орієнтацію об’єкта:

Наприклад, зміна орієнтації по Рисканню на 45° провертає тригранник навколо осі Y на визначений кут:

Використання кутової швидкості для розрахунку орієнтації в просторі
Коли автомобіль рухається з точки А в точку Б, на його спідометрі можна побачити виміряну швидкість. Ця швидкість є лінійною (грубо кажучи, можна вважати, що авто рухається вздовж лінії), і вимірюється в км/год, або за системою СІ – м/сек
Але крім лінійної швидкості фізики виділяють ще кутову швидкість.
Коли ми крутимо спінер, навколо однієї його осі виникає кутова швидкість, з якою вся конструкція обертається по-колу.

Кутова швидкість – це величина, яка описує, як швидко об’єкт обертається навколо певної осі. Якщо ви вже розумієте орієнтацію в просторі, то можна уявити кутову швидкість як швидкість зміни цієї орієнтації з часом.
Ключові аспекти кутової швидкості:
- Вимірювання: Кутова швидкість зазвичай вимірюється в радіанах за секунду (
рад/с) або градусах за секунду (°/с). - Напрямок: Кутова швидкість є векторною величиною. Її напрямок відповідає осі обертання згідно з правилом правої руки.
- Приклади:
- Секундна стрілка годинника має кутову швидкість
6°/сабоπ/30 рад/с. - Земля обертається навколо своєї осі з кутовою швидкістю приблизно
7.27 * 10^-5 рад/с.
- Секундна стрілка годинника має кутову швидкість
Як використовувати кутову швидкість?
Для початку, пригадаймо зв’язок між лінійною швидкістю та пройденою відстанню:
Для лінійного руху:
- Відстань = Швидкість * Час
s = v * t
Для обертального руху аналогічно:
- Кут = Кутова швидкість * Час
θ = ω * t
де θ (тета) – кут у радіанах, ω (омега) – кутова швидкість у радіанах за секунду, t – час у секундах.
Щоб краще зрозуміти це, розглянемо паралелі:
- Лінійна швидкість (
v) вимірює, як швидко об’єкт проходить відстань. Кутова швидкість (ω) вимірює, як швидко об’єкт проходить кут. - Лінійна швидкість вимірюється в метрах за секунду (
м/с). Кутова швидкість вимірюється в радіанах за секунду (рад/с). - Пройдена відстань (
s) вимірюється в метрах (м). Пройдений кут (θ) вимірюється в радіанах (рад).
Даний спосіб розрахунку кута із кутової швидкості називається інтегруванням Ейлера